Efficient, robust, and nimble
open-source legged robot
In progress
Updated: January 14 2019

| Cornell Tik-Tok Efficient, robust, and nimble open-source legged robot In progress Updated: January 14 2019 |
|
| Overview |
|---|
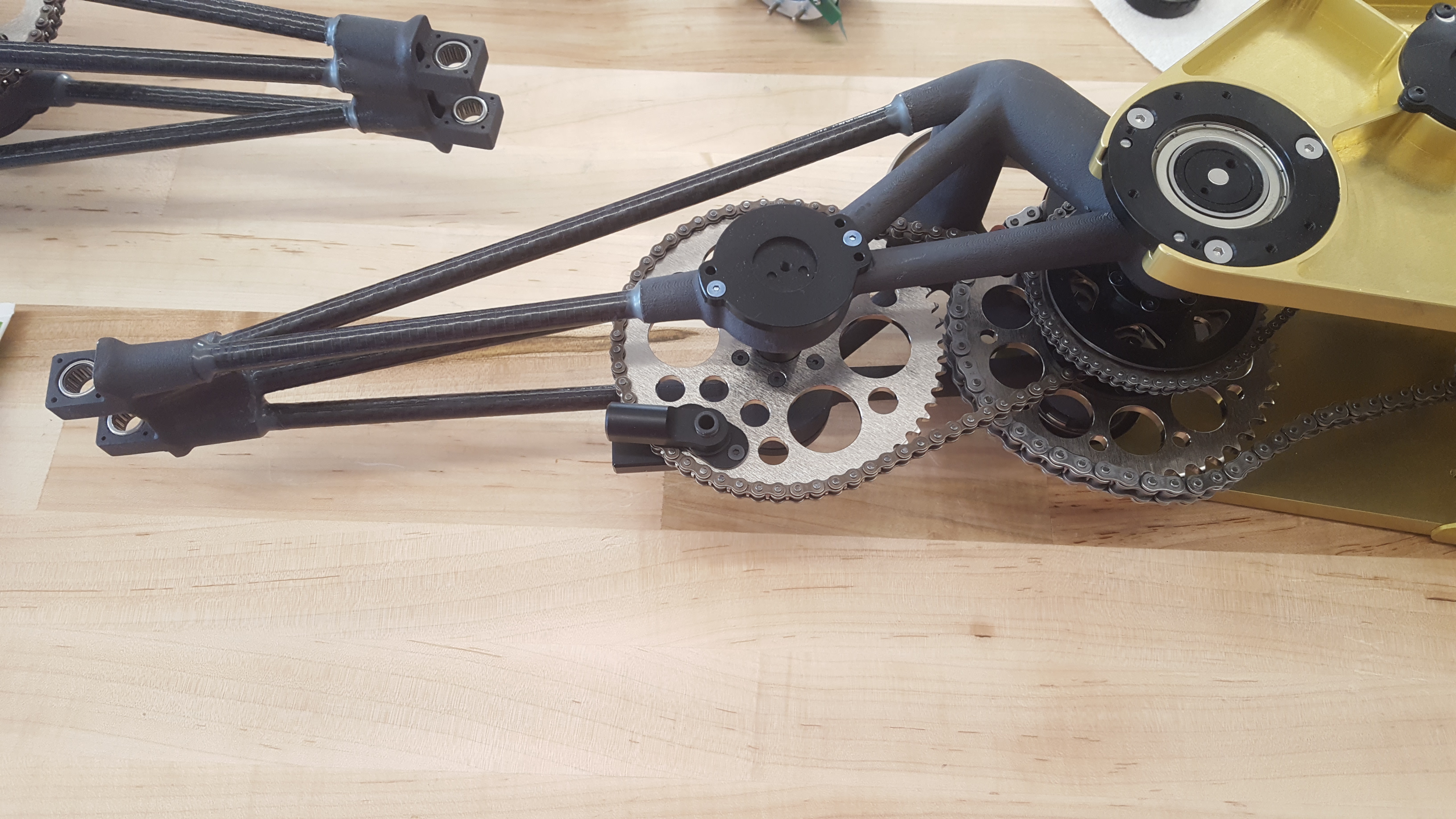
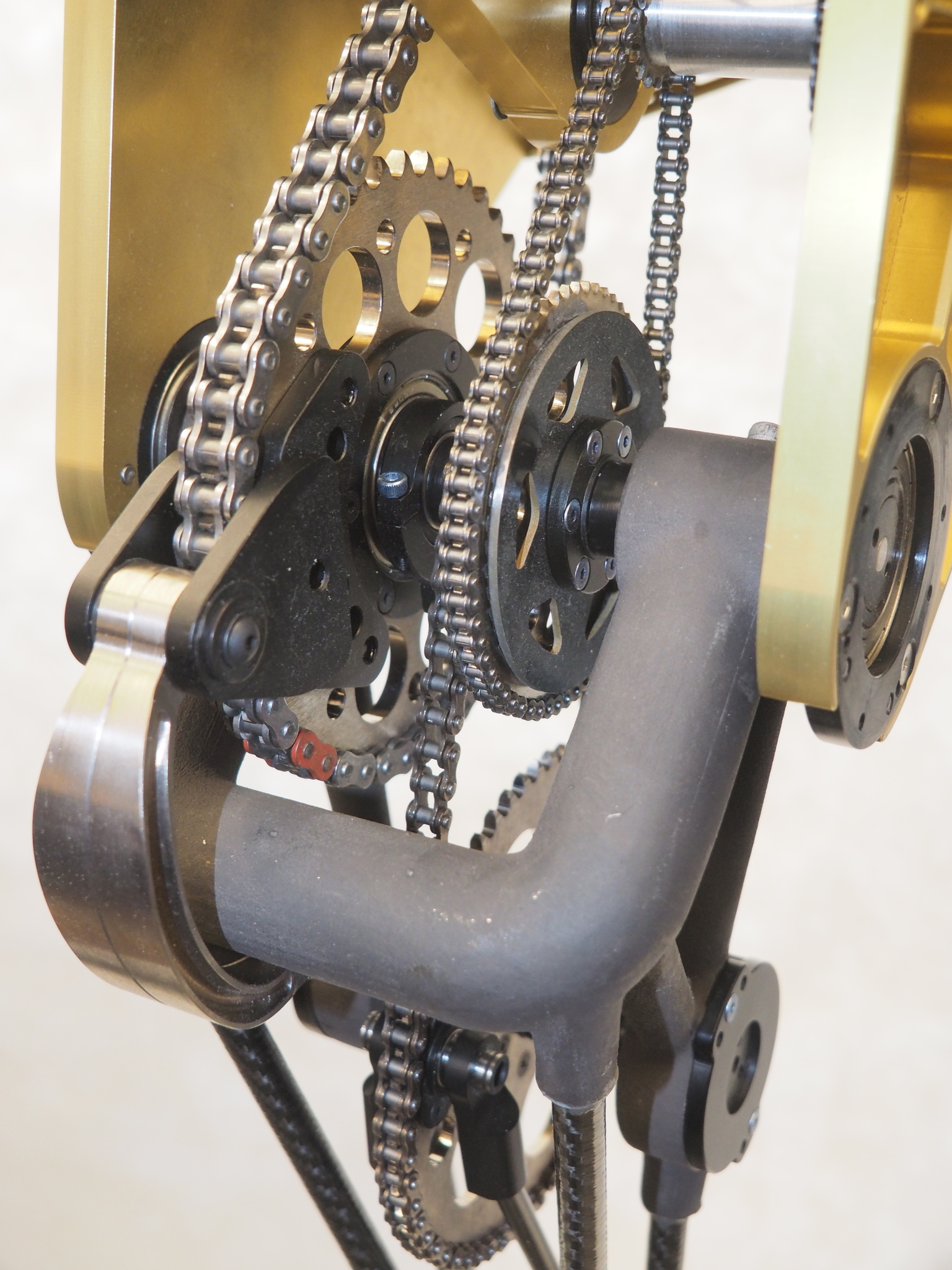
| The Tik-Tok project aims to build an open-source biped
robot platform with the dynamic balance and robustness of
Boston Dynamics's New ATLAS robot, but at a tenth the cost
and energy use. Think of it as a "Segway with legs." Its Cost of Transport (CoT) in simulation is 0.25 (≈ human). Tik-Tok uses high-efficiency chain drives and powerful brushless motors to create a highly nimble robot platform. If pushed or tripped, it can reposition its foot by up to a full step in under a quarter of a second (also ≈ human). Tik-Tok is 1.5 m tall (with head, as shown), weighs 30 kg, has 12 actuated joints, has a peak joint power of 2 kW, and is expected to be able to walk about 15 km on a single charge of its 300 W-hr 2 kg battery. This material is based upon work supported by the National Science Foundation under Grant No. 1317981. |
| Video about Tik-Tok from 2016 NRI talk (2 minutes). Good overview of project. |
 |
Design goals
General Details
Leg
actuators
|
Open Source FilesDownload the open source files for Tik-Tok. (510MB zip folder) |
|
|
Photos |
Papers and Posters |
| Principle Investigator: | Andy Ruina |
| Professional Engineer: | Jason Cortell |
| Current Graduate Students: | Matt Sheen, Ryan Elandt |
| Previous Graduate Students: | Matt Kelly, Petr Zaytsev, Anoop Grewal |
| Previous Post-doctoral fellow: | Javad Hasaneini |
| Undergraduates | Peter Bagaley, Olav Imsdahl |