News flash (August 2003): We now have a biped that walks
on level ground with power. Contact Steve Collins or Andy Ruina if you want
to see
a video or preprint. It is not online because it is not yet published and
some journals are wary of pre-publicity for such possibly high-publicity items.
Video Collection
Overview
Models
Walking and Locomotion Papers
Very Basic Reference List
Other Sites
The human body, like anything else that is large enough and slow enough, is
bound by the laws of Newtonian mechanics. Our research is centerred on understanding
of how humans walk from a Newtonian mechanics point of view. If we can gain
better insight into how humans walk, perhaps we could improve prosthetics for
the gait-impaired, help correct neuro-muscular deficiencies, or build better
two-legged walking robots. Our approach, which picks up on the ideas and inventions
of Tad McGeer, is to focus on what aspects of coordination can be largely explained
by mechanics.
|
|
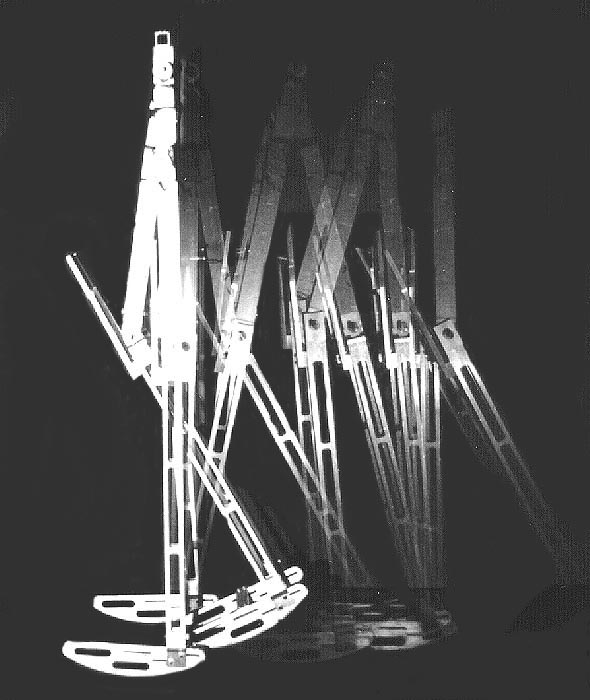
Our first of two near duplicates of one of McGeer's machines is shown walkingdownhill and to the left in this photo. The machine is meant to vaguely resemble a set of human legs in two dimensions. This so-called passive dynamic walker has no actuation except gravity, and no control system, except for mechanical knee stops that prevent the shanks from hyperextending with respect to the thighs. Inner and outer legs are paired to constrain it from falling over sideways, but it can still fall forward or backward or buckle at the knees. Curiously enough, as Tad McGeer first showed, this robot and others like it are capable of stable, human-looking walking. This visual appearance alone suggests that passive dynamic effects play a big role in the mechanics of human gait, that Nature takes major advantage of these passive stability and efficiency mechanisms in its designs. |
1) Simple models tend to give better insight into the underlying mechanics of complicated systems. The art, of course, as Einstein said, is to "make the model as simple as possible but no simpler!" not to throw the baby out with the bath water. By leaving brains and muscles out of people we think there are useful insights to be gained.
2) Compared to classical mechanics, neurological control is a poorly- understood subject. No one knows what the brain's feedback loops look like and no one really knows what sort of control algorithm is used to generate and maintain gait.
3) Evidence exists that a minimal amount of control and actuation is necessary for some basic human motions, including gait. (References include Kelso, Basmajian, Yamaguchi).
Generally our work involves developing mechanically complete models of walking
that emphasize the passive interaction of gravity, inertia, and collisions and
minimize the roles of control and actuation. To get some feeling for this concept,
imagine a slinky `walking' down stairs. A slinky is a device driven only by
gravity down a slope that seems to enter into a limit cycle- a "repeatable"
or steady periodic motion (at least on the right stairs with the right initial
conditions) that is inherent to the mechanism - much like rolling is inherent
to a round object. Once such models are understood, then small amounts of power
could be added in efficient ways to allow them to walk on level ground or up
a hill and simple control mechanisms can be introduced to increase the stability
of the motion. In the same way, we can study the inherent effects of mass distributions
and geometry on stability and efficiency of gait.
McGeer motivated his work by making an analogy to the development of powered
flight. The first successful flying devices were unpowered, uncontrolled gliders,
little models and paper-airplane-like things. Once gliders were perfected, then
engines and control systems were added. Of course, another approach to achieving
stable and efficient flying might have been to start with arbitrary amounts
of control and actuation and then to gradually minimize their role. But this
does not reflect the history of flight or our present approach to locomotion
modeling. But, to be frank, gliders are fun in their own right and so are these
walking gadgets.
Following McGeer, we have several 2D kneed walking simulations. The first two were done more or less at the same time, one by Mario Gomes in C (developing the equations with Mathematica) and the other by Mariano Garcia using MATLAB (developing the equations with Maple).
Dan Jung, and undergraduate in our lab at Cornell, created a Working Model
simulation based on the parameters and initial conditions that had yielded stable
walking in the first two simulations. Art Kuo in Michigan cleaned up the graphics
on Dan's simulation.
If you have WORKING MODEL, here is the walker: model.zip
or model.sit.
(Get a demo version of Working Model
from Knowledge Revolution.)
Compare the simulation above with Cornell's 4 leg McGeer walker: video
MATLAB code to simulate some walking models is available on
Mariano Garcia's homepage.
Mike Coleman with others has analyzed a 3D version of McGeer's rimless wheel, has invented the first walking toy that can't stand still, and has post-predicted on the computer that such a device should work. We have also built the first two-legged passive dynamic walker with knees.
We are attempting various walking devices with minimal power: one a straight legged machine with four legs and another a two leg machine with knees.
The best walking robot in the world (2 legs, knees, slaved arms), Collins
We think this robot has as natural looking a steady walking gait as any
other robot in the world (Compare, for example to the Honda
Humanoid. Let us know of other comparison videos or if you disagree.) In
the summer of 2000, undergraduate Steven
Collins worked on improving Martijn Wisse's passive walker. The resulting
walking device combines 4 ideas to try to lift kneed 2D passive-dynamic walking
to 3 dimensions. The ideas are: 1) Use wide feet that guide the motion (as in
the 1912 Bechstein patent), 2) Use soft heels that kill the instability from
indeterminacy at the collision of a line of contact, 3) counter-swing the arms
to reduce angular momentum effects about the vertical axis (as per the 1888
Fallis patent), 4) Swing the arms side to side at appropriate times to reduce
side-to-side rocking.
photo (20K) photo
(20K) photo
(20K
SteveAngle.mov (3.8meg)
SteveAngle.mpg
(1.6meg) SteveBehind.mov
(3.6meg) SteveBehind.mpg(1.8meg)
Kneed Walker (2 legs), Wisse
In the fall 0f 1998 Martijn Wisse visited the Cornell lab and, inspired by the
1912 Bechstein patent, built this most remarkable machine.
mov (4 meg)
| .mov (499k) | .avi (148k) |
Dan Jung's Walker Movie (Cornell HP lab undergrad project)
Animation of Working Model version of 2D kneed walker (same as above picture).
mov (372k) avi
(693k)
Point Mass Brachiation animation: Videos by Mario Gomes: mpg(88K), gif(400K)
A collection of old patents of walking toys
(scanned .pdf files, about 2 meg each): Fallis
1888, Bechstein
1912 , patent
3, patent
4, Wilson
1938 , patent
6
T. McGeer. Principles of walking and running.
In Advances in Comparative and Environmental
Physiology 11: Mechanics of Animal Locomotion.
R. McN. Alexander, ed.
Berlin: Springer-Verlag 1992.
T. McGeer. Dynamics and control of bipedal locomotion.
J. Theoretical Biology 16 3, 277-314, 1993.
Art Kuo At Michigan
has done much work closely related to passive dynamics.
BioRobotics
Lab at Washington (Glenn Klute).
Biomechanics World Wide
Delft Biped Laboratory (van
der Linde, Wisse ...)
ISB
Martin Buehler's Ambulatory Robotics
Lab at McGill
The Biomechanics Laboratory
at UC Berkeley.
The Poly-Pedal Laboratory at UC
Berkeley, where Mariano Garcia pursued post-doctoral research on cockroach locomotion.
Georgia Tech Animation Lab
(Hodgins et. al.)
Yildirim Hurmuzlu
at SMU.
Ton van den Bogert
at the Cleveland Clinic.
The UNH Robot Lab.
Eric Dunn
at Harvard.
Human Engineering Lab
at UC Berkeley (Kazerooni).
Ambarish Goswami.
Hans De Man's multibody
mechanics group at the Free University of Brussels.
Aarne Halme's group at the Helsinki
University of Technology, (where Andy Ruina spent the 1997-98 academic year).
Robotics group at INRIA, (they also
do work on passive models).
Michael T. Rosenstein at U
Mass, an excellent biped bibliography among other things.
Matthew Berkemeier
at Utah State.
Shuji Kajita, with
links to biped researchers around the world.
Tad McGeer's current work (building
small autonomous planes, one crossed the Atlantic in the summer of 98, the pacific
is next).
Walking
Machines Catalogue (Karsten Berns, Germany. An attempt to catalogue all
walking robots)
MusculoGraphics
Robot Books
Knowledge Revolution, where you can get a
demo version of Working Model Software.
Working Model files to simulate our passive walker can be downloaded below.
There are two versions: one is a raw file, and one is MacBinary encoded (needs
Stuffit to open). Neither file seems to work with all systems/setups/versions;
so far, we have not found a robust way to allow people to download Working Model
files. If you have trouble downloading, contact garcia@tam.cornell.edu
Working Model passive kneed walker (raw file)
Working Model passive
kneed walker (needs Stuffit to open)
MATLAB code to simulate a few different walking models is available on
Mariano Garcia's homepage.
Any Other Ideas? Let us know if you want to be on our list.
Return to the Human Power Lab homepage.
{kind=link}
{kind=link}
{kind=link}
{kind=link}