

| Home | Chapter 1 - Double Pendulum | Chapter 2 - Cornell Ranger Equations of Motion Derivation | Chapter 3 - Simulation of the Simplest Walker | Chapter 4 - Hip Powered Walker |
Cornell Ranger Equations of Motion Derivation
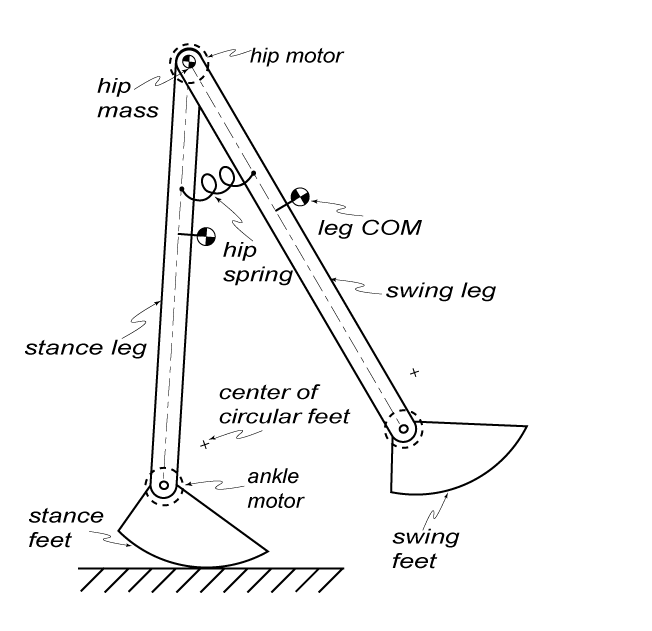
To continue our exploration of dynamic simulations, we will symbolically derive the equations of motion for the Cornell Ranger. The model of the Cornell Ranger that will be used is depicted in figure 1 below. The model has one torsional spring at the hip.
Figure 6. Cornell Ranger Model and Terminology
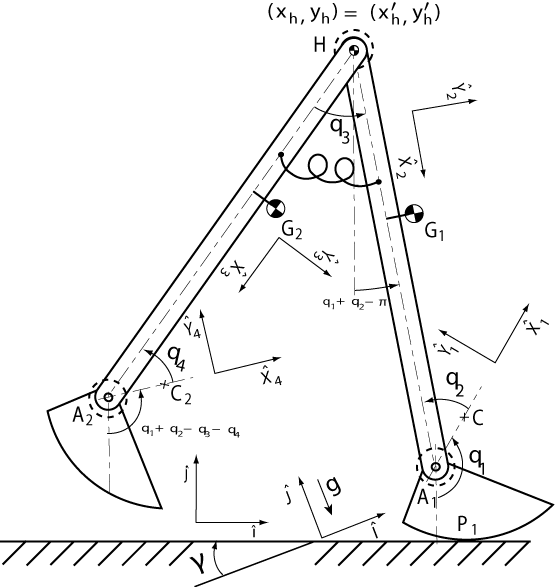
Figure 7. Cornell Ranger showing assumed coordinate systems and angles
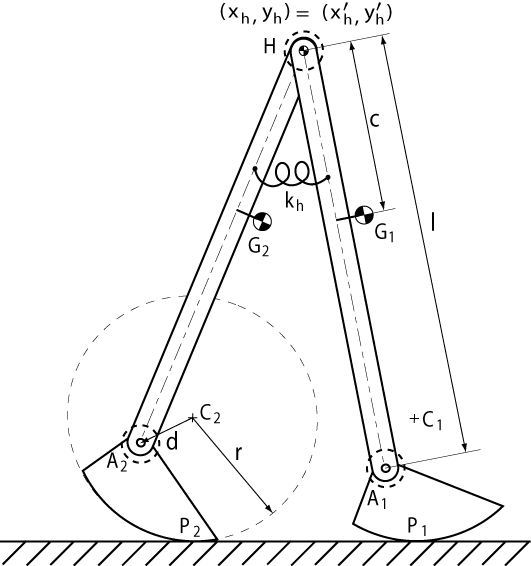
Figure 8. Cornell Ranger showing dimensions
Equations of Motion
The dynamics of Cornell Ranger are much more complicated than that of the double pendulum. There is not one set of governing equations that can describe the dynamics of the walker for all time. Thusly, we must derive equations of motions for two distinct phases of motion, single stance and double stance, which depend on whether one or both feet are on the ground respectively. In addition, we must balance angular momentum before and after heelstrike. Heelstrike occurs the instant a foot collides with the ground.
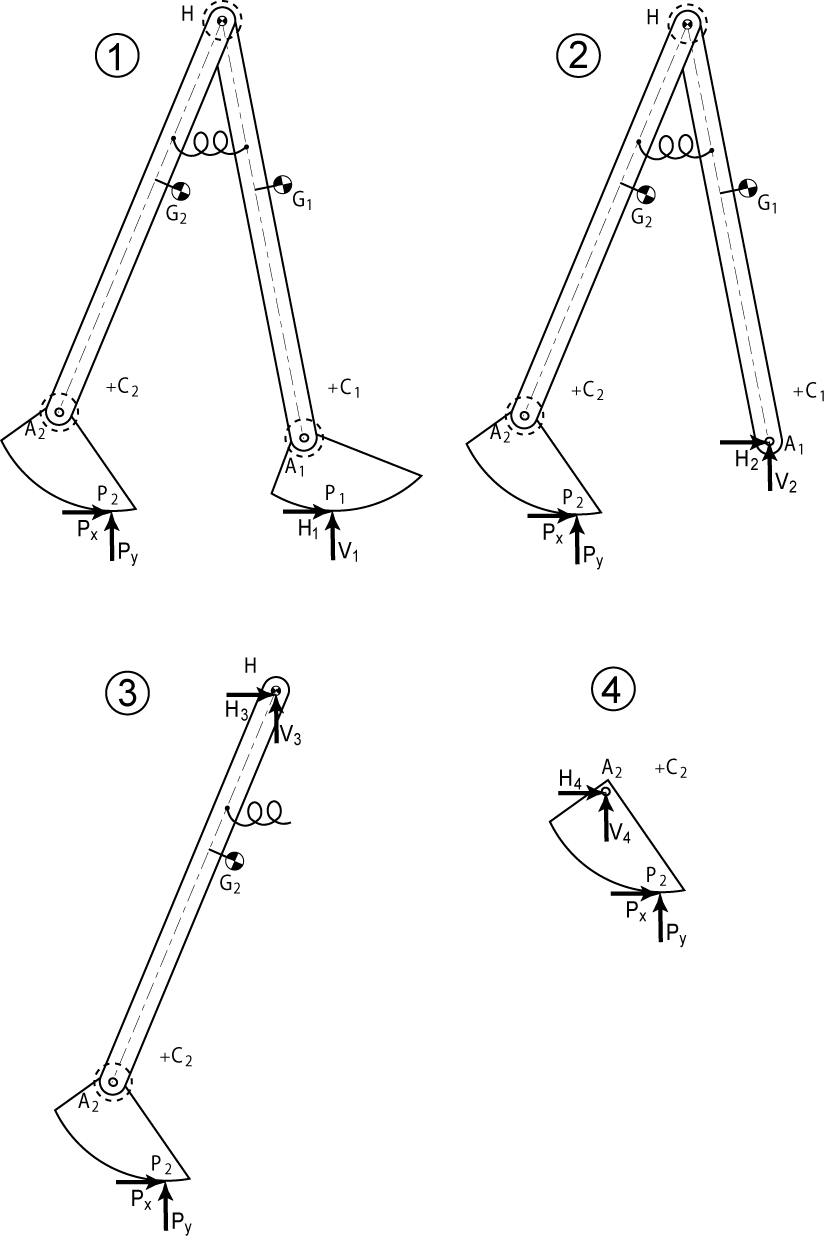
Similarly to the double pendulum example, we will use the Newton-Euler method to solve for the equations of motion. We will first solve for the equations of motion for the single stance and double stance phases by perform four angular momentum balances, one for each of the free body diagrams below.
Figure
9. Free Body
Diagrams of a) The entire walker, Angular Momentum balance about
point  b) The walker minus the front foot, Angular Momentum balance
about point
b) The walker minus the front foot, Angular Momentum balance
about point  c)
The back leg, Angular Momentum balance about point
c)
The back leg, Angular Momentum balance about point  d) The back foot, Angular Momentum balance about point
d) The back foot, Angular Momentum balance about point 
From the four free body diagrams, we get,








where,
 Masses of one leg and hip
Masses of one leg and hip
 Inertia
of one leg
Inertia
of one leg
 Inertia of motors
Inertia of motors
 Gravitational acceleration
Gravitational acceleration
 Angular
accelerations of the
stance and swing leg
Angular
accelerations of the
stance and swing leg
 Acceleration
of point
Acceleration
of point 
 Velocity of point
Velocity of point
 Hip
motor torque
Hip
motor torque
 Hip spring torque
Hip spring torque
 Torques at points and
Torques at points and
 External moment
about point A
External moment
about point A
 Rate of change
of angular momentum
about point A
Rate of change
of angular momentum
about point A
 Force on the trailing leg in
double stance
Force on the trailing leg in
double stance
 Position
vector from point B to A
Position
vector from point B to A
 Absolute angle made by stance foot
and stance leg after and before heelstrike
Absolute angle made by stance foot
and stance leg after and before heelstrike
 Relative angle between stance foot
and stance leg after and before heelstrike
Relative angle between stance foot
and stance leg after and before heelstrike
 Relative angle between legs; also
hip angle after and before heelstrike
Relative angle between legs; also
hip angle after and before heelstrike
 Relative angle between swing foot
and swing leg after and before heelstrike
Relative angle between swing foot
and swing leg after and before heelstrike
 Unit vectors
along x, y and z axes
Unit vectors
along x, y and z axes
For the single stance equations of
motion, we solve for the angular accelerations while setting the
trailing leg force, ,
equal to zero. For the double stance equations
of motion, we solve for the angular accelerations while setting the
trailing leg force, ,
equal to  .
.
In addition to these equations, we
must also find two more equations from the two constraint equations
that will enforce that the trailing leg rolls while the walker is in
the double stance phase.  are
found by writing the hip coordinate, ,
from the point of view of while
are
found by writing the hip coordinate, ,
from the point of view of while  are found by writing the hip
coordinate from the point of view of
are found by writing the hip
coordinate from the point of view of  .
.




The two additional equations can be
found by setting  and
and
 .
.
We must now conserve angular momentum over heelstrike. We will look at the instances before and after heelstrike.
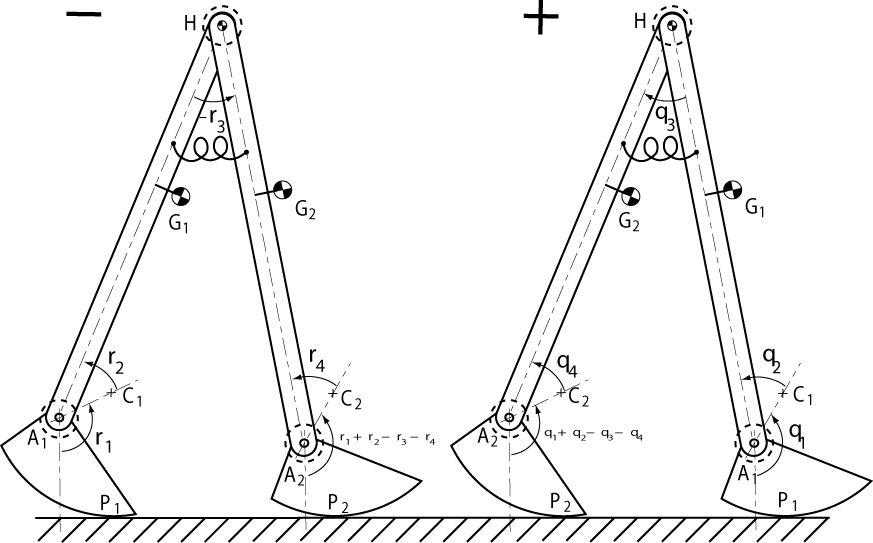
Figure 10. Cornell Ranger before and after heelstrike

Figure 11. Free Body Diagram before and after heelstrike, a) Entire walker b) Walker minus the forward foot
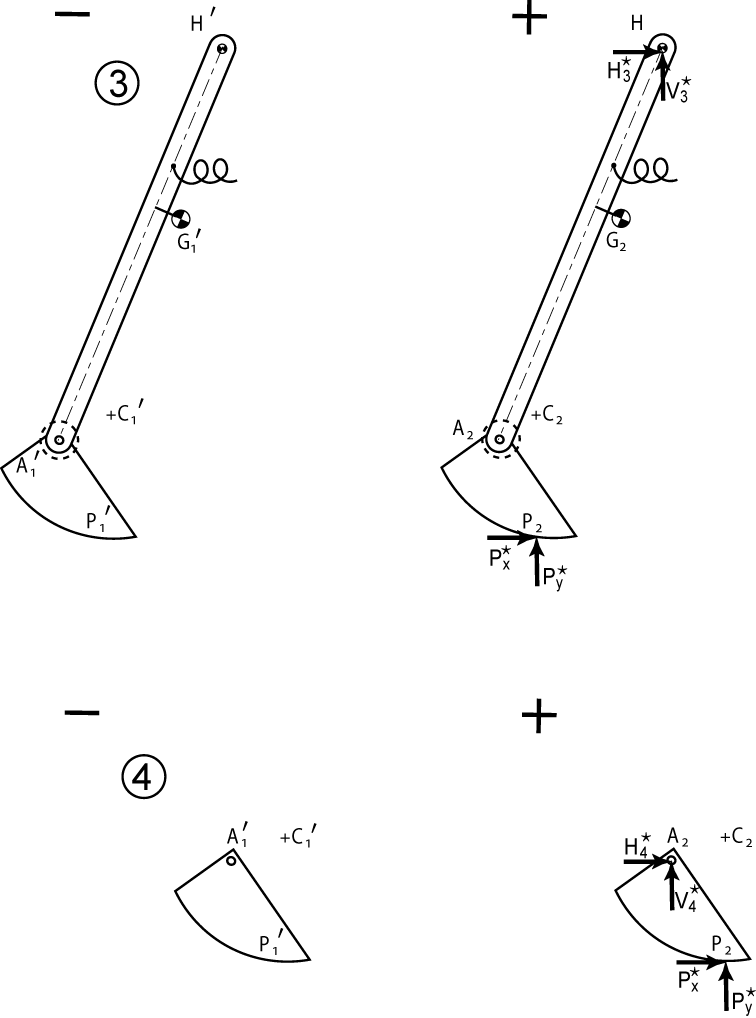
Figure 12. Free Body Diagrams before and after heelstrike, a) Back leg with foot b) Back foot
From the four free body diagrams, we get,












where,
 Angular
momentum about point
Angular
momentum about point
 Impulse on the trailing leg in
double stance
Impulse on the trailing leg in
double stance
To transition into the single stance
phase, the first three angular momentum equations are required and should
be set to zero. These equations need to be solved for the
angular velocities.
To transition into the double stance
phase, all four equations are needed in addition to the first
derivatives of the constraint equations,  and
and  .
Also, should
be set
equal to
.
Also, should
be set
equal to  and
the equations should be solved for the angular
velocities.
and
the equations should be solved for the angular
velocities.
Symbolic Derivation of the Equations of Motion in MATLAB
Similarly to the previous example of a double pendulum, we start the symbolic derivation by defining the symbolic variables and parameters, defining the necessary reference frames, and defining the position vectors. We then set up the angular velocities and accelerations. We can now find the constraint equation and the linear velocities and accelerations.
q = [q1; q2; q3; q4];
u = [u1; u2; u3; u4];
ud = [ud1; ud2; ud3; ud4];
xH = l*sin(q1+q2)-d*sin(q1) - r*q1;
yH = -l*cos(q1+q2) + d*cos(q1) + r;
xG1 = xH+dot(r_H_G1,i);
yG1 = yH+dot(r_H_G1,j);
xG2 = xH+dot(r_H_G2,i);
yG2 = yH+dot(r_H_G2,j);
xH2 = -l*sin(q3-q1-q2)-d*sin(q1+q2-q3-q4)-r*(q1+q2-q3-q4);
yH2 = -l*cos(q3-q1-q2)+d*cos(q1+q2-q3-q4)+r;
xhdot1 = jacobian(xH,q)*u;
xhddot1 = jacobian(xhdot1,q)*u + jacobian(xhdot1,u)*ud;
yhdot1 = jacobian(yH,q)*u;
yhddot1 = jacobian(yhdot1,q)*u + jacobian(yhdot1,u)*ud;
xhdot2 = jacobian(xH2,q)*u;
xhddot2 = jacobian(xhdot2,q)*u + jacobian(xhdot2,u)*ud;
yhdot2 = jacobian(yH2,q)*u;
yhddot2 = jacobian(yhdot2,q)*u + jacobian(yhdot2,u)*ud;
v_H1 = xhdot1*i+yhdot1*j;
v_H2 = xhdot2*i+yhdot2*j; %velocties of hip assuming P1 and P2 is at rest resp.
vx_H = dot(v_H1,i);
vy_H =dot(v_H1,j);
a_H1 = xhddot1*i+yhddot1*j;
a_H2 = xhddot2*i+yhddot2*j; %accelerations of hip assuming P1 and P2 is at rest resp.
ax_H = dot(a_H1,i);
ay_H = dot(a_H1,j);
v_G1 = v_H1+cross(om2,r_H_G1);
v_G2 = v_H1+cross(om3,r_H_G2);
a_G1 = a_H1+cross(om2,cross(om2,r_H_G1))+cross(al2,r_H_G1);
a_G2 = a_H1+cross(om3,cross(om3,r_H_G2))+cross(al3,r_H_G2);
CD = yh - yhdash;
Next, we will setup up the angular momentum balances and angular momentum terms. From these we will get the necessary equations for double stance, single stance and heelstrike. We will be solving for the equations in the form of,

Additionally, we will derive the kinetic and potential energy. The next task is to have MATLAB create m-files containing the equations of motion for use in the simulation. The equations of motion for the Cornell Ranger are much more complicated than the double pendulum and it is much easier to have MATLAB automatically create the m-files. We will use the single stance file as an example.
We will first create a file called single_stance.m using fopen with the 'w' permission. This allows us to create or writing to the file without regard to its current contents.
%%% Write single_stance.m %%%
fid=fopen( 'single_stance.m','w');
We then have MATLAB write to the file using the fprintf command. This file will be setup in the same way the equations of motion file for the double pendulum was setup.
fprintf(fid, 'function zdot=single_stance(t,z,flag,GL_DIM) \n\n');
fprintf(fid, 'q1 = z(1); u1 = z(2); \n');
fprintf(fid, 'q2 = z(3); u2 = z(4); \n');
fprintf(fid, 'q3 = z(5); u3 = z(6); \n');
fprintf(fid, 'q4 = z(7); u4 = z(8); \n');
fprintf(fid, 'xh = z(10); vxh = z(11); \n');
fprintf(fid, 'yh = z(12); vyh = z(13); \n\n');
fprintf(fid, 'M = GL_DIM(1); m = GL_DIM(2); I = GL_DIM(3); \n');
fprintf(fid, 'l = GL_DIM(4); c = GL_DIM(5); w = GL_DIM(6); \n');
fprintf(fid, 'r = GL_DIM(7); d = GL_DIM(8); g = GL_DIM(9); \n');
fprintf(fid, 'gam = GL_DIM(10); \n\n');
fprintf(fid, 'Ta1 = 0; Th=0; Thip = 0; \n\n');
Now
we must write the  and
and  matrices.
To do this, we will us the fprintf command but we must also convert
the symbolic equation we have derived to characters to write to the
file. In the following code, MATLAB replaces the %s with the second
argument which contains the character version of the equation.
matrices.
To do this, we will us the fprintf command but we must also convert
the symbolic equation we have derived to characters to write to the
file. In the following code, MATLAB replaces the %s with the second
argument which contains the character version of the equation.
fprintf(fid,'M11 = %s; \n', char(simple(M_SS(1,1))) );
fprintf(fid,'M12 = %s; \n', char(simple(M_SS(1,2))) );
fprintf(fid,'M13 = %s; \n', char(simple(M_SS(1,3))) );
fprintf(fid,'\n');
fprintf(fid,'M21 = %s; \n', char(simple(M_SS(2,1))) );
fprintf(fid,'M22 = %s; \n', char(simple(M_SS(2,2))) );
fprintf(fid,'M23 = %s; \n', char(simple(M_SS(2,3))) );
fprintf(fid,'\n');
fprintf(fid,'M31 = %s; \n', char(simple(M_SS(3,1))) );
fprintf(fid,'M32 = %s; \n', char(simple(M_SS(3,2))) );
fprintf(fid,'M33 = %s; \n', char(simple(M_SS(3,3))) );
fprintf(fid,'\n');
fprintf(fid,'RHS1 = %s; \n', char(simple(RHS_SS(1))) );
fprintf(fid,'RHS2 = %s; \n', char(simple(RHS_SS(2))) );
fprintf(fid,'RHS3 = %s; \n', char(simple(RHS_SS(3))) );
fprintf(fid,'\n');
fprintf(fid,'MM = [M11 M12 M13; \n');
fprintf(fid,' M21 M22 M23; \n');
fprintf(fid,' M31 M32 M33]; \n\n');
fprintf(fid,'RHS = [RHS1; RHS2; RHS3]; \n\n');
fprintf(fid,'X = MM \\ RHS; \n\n');
fprintf(fid,'ud1 = X(1); \n');
fprintf(fid,'ud2 = X(2); \n');
fprintf(fid,'ud3 = X(3); \n');
fprintf(fid,'ud4 = 0; \n\n');
fprintf(fid,'DTE = %s; \n', char(simple(DTE)) );
fprintf(fid,'axh = %s; \n', char(simple(xhddot)) );
fprintf(fid,'ayh = %s; \n', char(simple(yhddot)) );
fprintf(fid,'\n');
fprintf(fid,'zdot = [u1 ud1 u2 ud2 u3 ud3 u4 ud4 ... \n');
fprintf(fid,' DTE vxh axh vyh ayh]''; \n');
fclose(fid);
Running this file yields files containing the equations of motion for single stance, double stance and heelstrike that are ready to use in a simulation.
Cornell Ranger Equations of Motion Derivation MATLAB File
| Home | Chapter 1 - Double Pendulum | Chapter 2 - Cornell Ranger Equations of Motion Derivation | Chapter 3 - Simulation of the Simplest Walker | Chapter 4 - Hip Powered Walker |