A Three-Dimensional Passive-Dynamic Walking Robot with Two Legs and
Knees (PDF)
Collins, S. H., Wisse, M., Ruina, A.
International Journal of Robotics Research, Vol. 20, No. 2, Pages
607-615, 2001
VIDEO: From Angle
Stream
on Youtube |
downloadable(MPG)
(1.6 MB)
VIDEO: From Behind
Stream on
Youtube |
downloadable(MPG)
(1.7 MB)
VIDEO:
Walking Medley (MOV)
(34.8 MB)
In the fall 0f 1998, Martijn Wisse visited the Cornell lab. Inspired by
the
1912 Bechstein patent,
he built a most remarkable machine.
Kneed Walker, by Martijn Wisse
Stream
on Youtube |
downloadable
(MOV) (3.9MB)
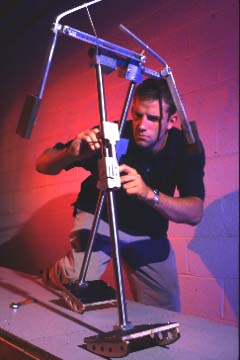
In the summer of 2000, undergraduate
Steven
Collins worked on improving Martijn Wisse's passive walker. The
resulting walking device combines four ideas to try to lift kneed 2D
passive-dynamic walking to 3 dimensions. The ideas are:
- Use wide feet that guide the motion, as per the 1912
Bechstein patent
- Use soft heels that kill the instability from indeterminacy at the
collision of a line of contact.
- Counter-swing the arms to reduce angular momentum effects about
the vertical axis, as per the 1888
Fallis patent.
- Swing the arms side to side at appropriate times to reduce
side-to-side rocking.
We think this robot has as natural looking a steady walking
gait as any other robot in the world. Compare, for example to the Honda Humanoid.
Let us know of other comparison videos or if you disagree.