Applying
Control Theory to Bicycle Linearized Equations of Motion
By: Andrew Dressel
Advisor: Professor Andy Ruina
The Biorobotics and Locomotion Laboratory
Department of Theoretical and Applied Mechanics
2003-2015
Abstract
It is possible to plug the linearized equations of motion for an idealized bicycle, contained in JBike6, into control algorithms. Below is an example of that in MATLAB.
Linearized
equations of motion for an uncontrolled bicycle
Introduction
In order to understand what is required for a rider to control a bicycle, it may be useful to apply control theory. One requirement is the linearized equations of motion, which JBike6 can provide. Below is an example of using the equations of motion from JBike6 to create a transfer function which can be analyzed with MATLAB’s Control System Toolbox. The example goes so far as to create a pole-zero map which exactly matches the plot of eigenvalues generated by JBike6.
M0*qdd+(C1.*v)*qd+(K0+K2.*v^2)*q=0[1]
i.e ![]()
where
![]()
v = forward speed
M0 = Mass matrix
C1 = Velocity sensitivity matrix
K0 and
Let the control 'input' u(t) be steer torque τ and the 'output' y(t) be lean angle. Then
![]()
Multiply through by M0-1 now, to avoid inverting a singular matrix later
![]()
For computational simplicity, let ![]() , so
, so
![]()
![]() ,
and
,
and ![]() , recast from 2
coupled 2nd-order equations to 4 1st-order equations.
, recast from 2
coupled 2nd-order equations to 4 1st-order equations.
To that end, let ![]() ,
, ![]() ,
, ![]() , and
, and ![]() . Thus
. Thus
becomes
 ,
,
which can be written as
![]() or
or
![]()
So, finally
 ,
,
 ,
,
![]() ,
and
,
and
![]()
We can convert the above to the numerator and denominator of a transfer function with MATLAB's ss2tf() function
[numG, denG] = ss2tf(A,B,C,D)
Then we can combine them into a single transfer function with MATLAB's tf() function
G = tf(numG, denG)
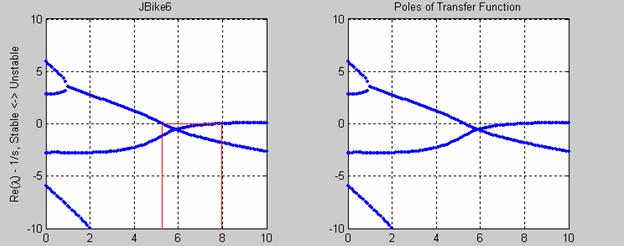
We can then use MATLAB’s pole-zero map function: [p, z] = pzmap(G)
Which, for the Schwinn Crown, has poles that look like this: a perfect match for the eigenvalues generated in JBike6
% From JBike6
% The linearized equations of motion read:
%
% M0*qdd+(C1.*v)*qd+(K0+K2.*v^2)*q=0
%
% where v is the forward speed of the bike.
%
% Requires MATLAB’s Control System Toolbox
% set the bicycle parameters
JBini
% calculate the linearized equations of motion
JBmck
% calculate the weave and capsize speed
JBvcrit
% calculate the eigenvalues and eigenvectors for a speed range
JBeig
% plot only the Real part of the eigenvalues
subplot(1,2,1);
JBrev
title('JBike6'); a = axis;
drawnow;
% create transfer function from state-space representation
% use x1 = q1, x2 = q1_dot, x3 = q2, x4 = q2_dot
subplot(1,2,2);
v = 0:0.1:10;
M = inv(M0);
for i = 1: length(v)
S = M*(C1.*v(i));
K = M*(K0 + K2.*v(i)^2);
A = -[0, -1, 0, 0;
K(1,1), S(1,1), K(1,2), S(1,2);
0, 0, 0, -1;
K(2,1), S(2,1), K(2,2), S(2,2)];
B = [0, 0, 0, 0;
0, M(1,1), 0, M(1,2);
0, 0, 0, 0;
0, M(2,1), 0, M(2,2)];
C = [1, 0, 0, 0];
D = [0, 0, 0, 0];
[numG, denG] = ss2tf(A, B, C, D, 2);
G = tf(numG, denG);
[p, z] = pzmap(G);
plot(v(i).*ones(1, length(p)), p, '.'); hold on;
%rlocus(G)
%sisotool(G);
end
grid on; hold off; axis(a);
title('Poles of Transfer Function');