{kind=link}

Lecture and do-it-yourself demonstrations
Dynamics, TAM 2030, Cornell
1) Drop two balls, a big ball and a small ball (do it yourself
= DIY, and lecture). They hit the ground at the same time. Why?
To Galileo that was a principle in itself. But in Dynamics, with F=ma, it's
something we have to figure out.
Use any wildly disparately-sized balls or objects for the demo.
Use F=ma to predict the result.
2) Drop two cones (DIY and lecture). Two paper cones are made with the same paper and have the same conical angle. One has twice the radius as the other. Which falls faster? Print two copies of this sheet and cut out to make the cones and do the experiment. Use F=ma to predict the result. Hint: the cutout lets you think about how to calculate the area of the paper used to make the cone. The result holds for linear or quadratic drag, or a combination of both. It holds for the steady state or for the transient response.
3) Spring and mass. a) using air track (with
air pump and all in lecture. See (5) below.), b) using self
as imagined mass walking back and forth with imagined force pushing this way
and that (DIY & lect). c) Using
a spring and mass held by hand (video). d) DIY: Hang a shoe
with a rubberband.
4) Forced oscillations and damping. 1) Use apparatus from old TAM 203 lab. Can be used with no data collection. 2) Use spring and mass, or rubberband and shoe, and vertically oscillate your support hand. Note fast hand motions leads to fast small 180-degree-out-of-phase motions. Slow hand motions leads to mass moving up and down with hand. Resonant hand motions lead to large oscillations
.
5) Two DOF oscillations. Use the air track used for Spring and mass above (from old TAM 203 lab). Shows normal modes and, if you pick the motor speeds correctly, resonance of either mode.

6) Normal modes of a slinky (video).

7) Normal modes of a dulcimer (video). Excite
various modes by putting one finger lightly on a node when plucking. Change
relative intensity of modes, changing "tone" by plucking with fingernail near
the end.

8) Collisions using airtrack. Using airtrack from (5) above. Take off springs and then bounce masses together (e~1). And again with chewing gum in between (approximately e~0).
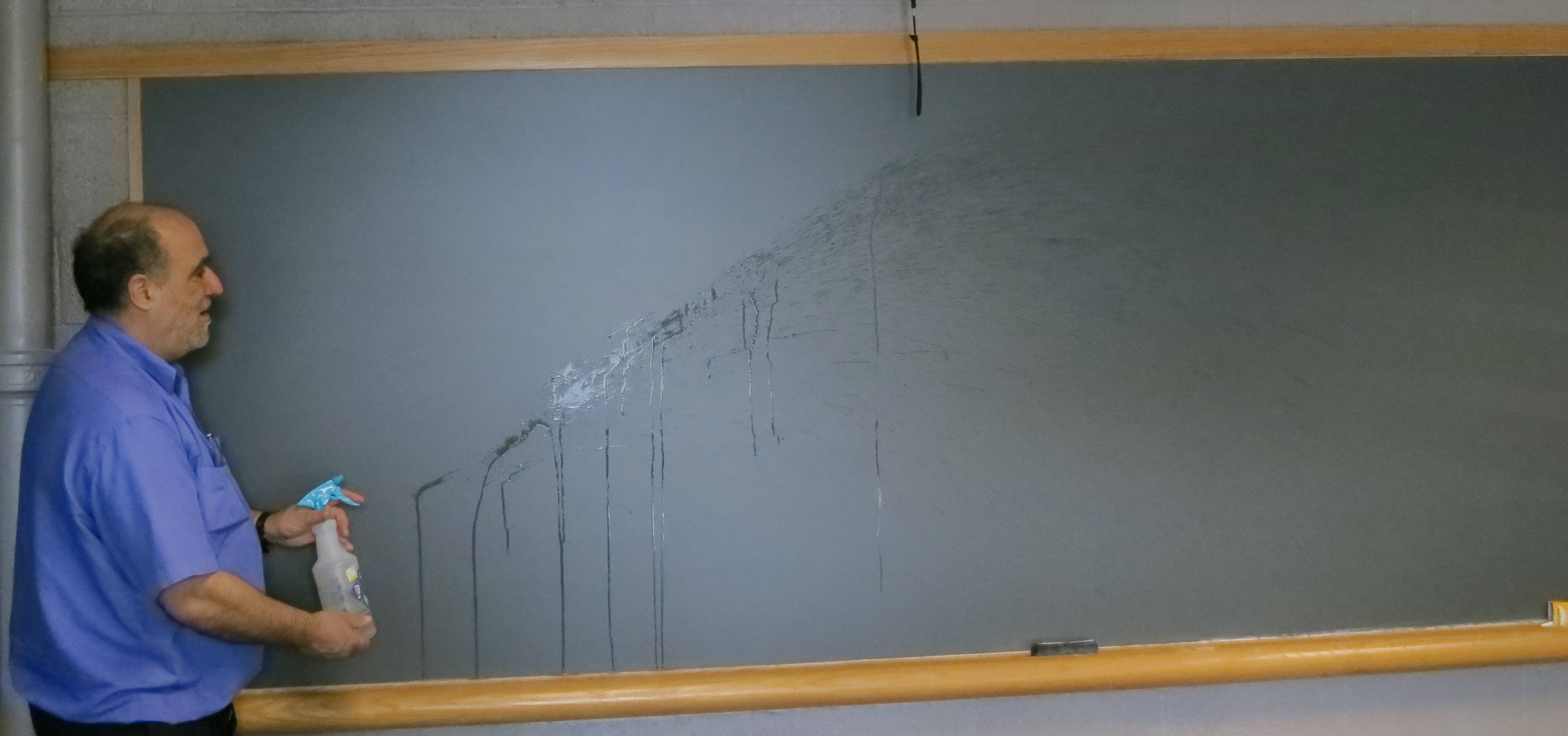
9) Trajectories (3 demos): a) Throw chalk, eraser or ball and note parabolic trajectory; b) Throw wad of paper and note trajectory is not parabolic, but falls more vertically at the end; c) Use spray bottle almost tangent to blackboard, and aimed up to show trajectories of droplets of water left as streaks on the blackboard, draw on top with chalk to show a variety of trajectories.

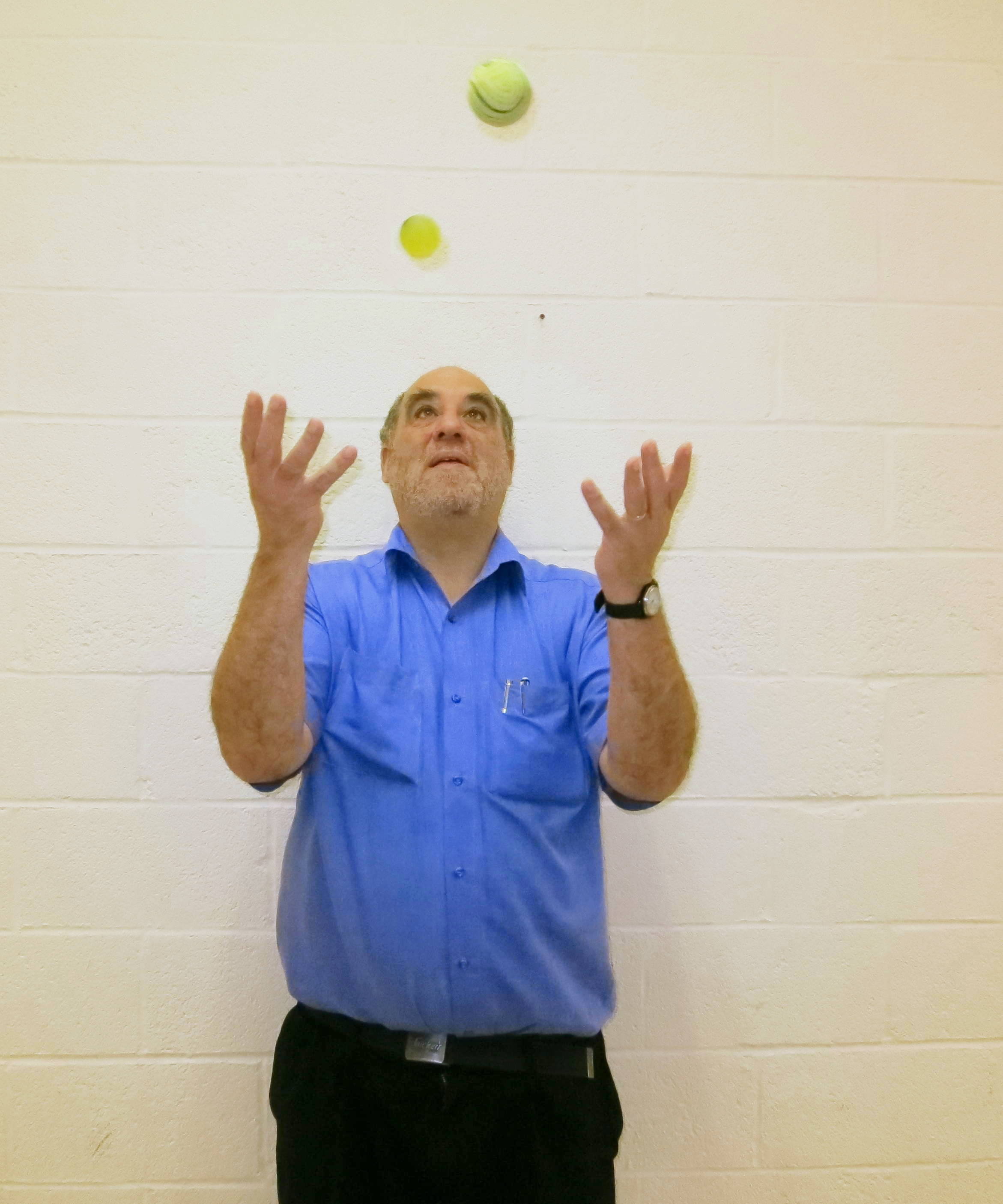
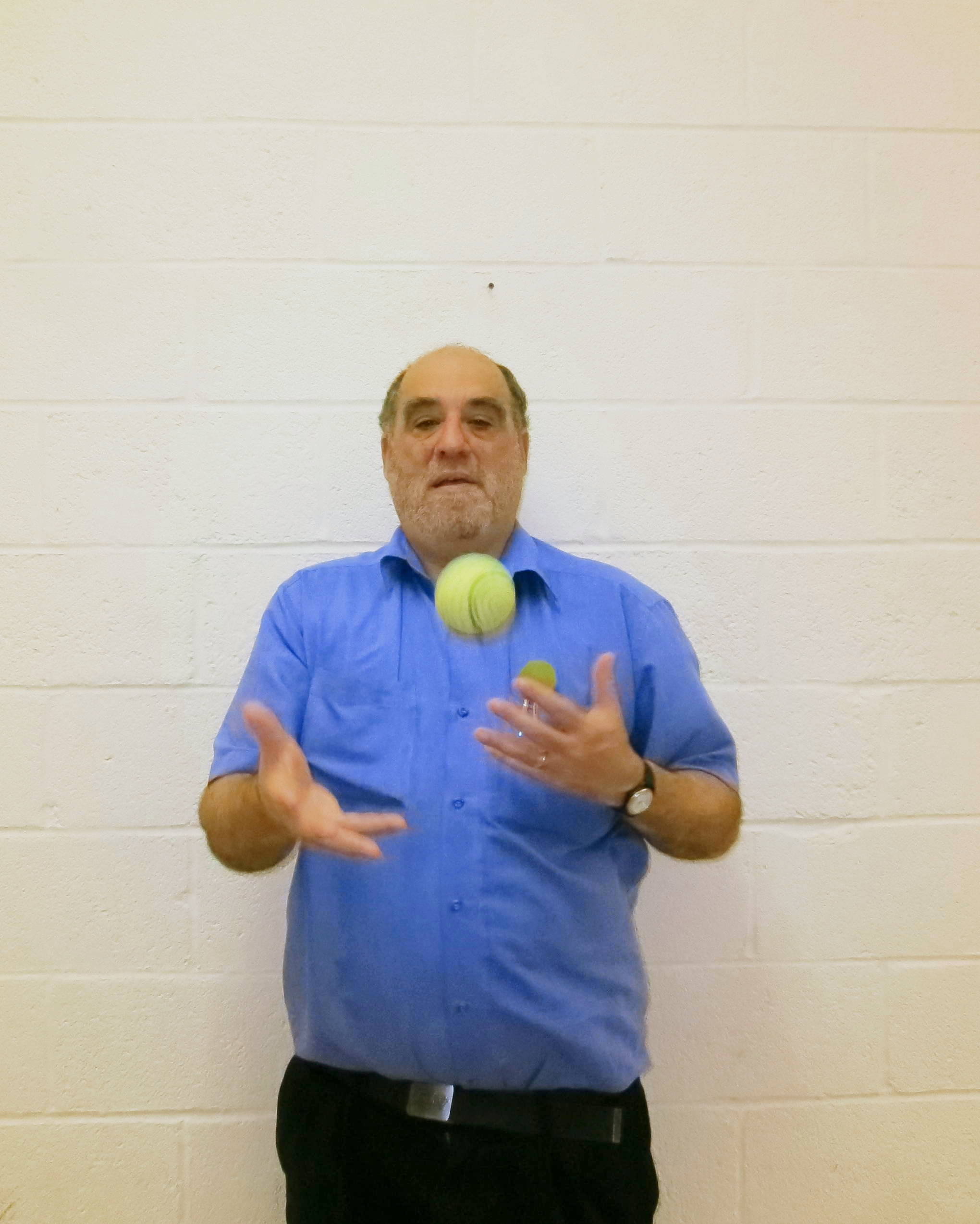
10) Colliding balls in space. Throw two balls in air and watch them collide: throw, fly, bang, try to catch. The demo is unrealistic because the balls have finite friction and the simple calculation for spatial collisions assumes no friction.


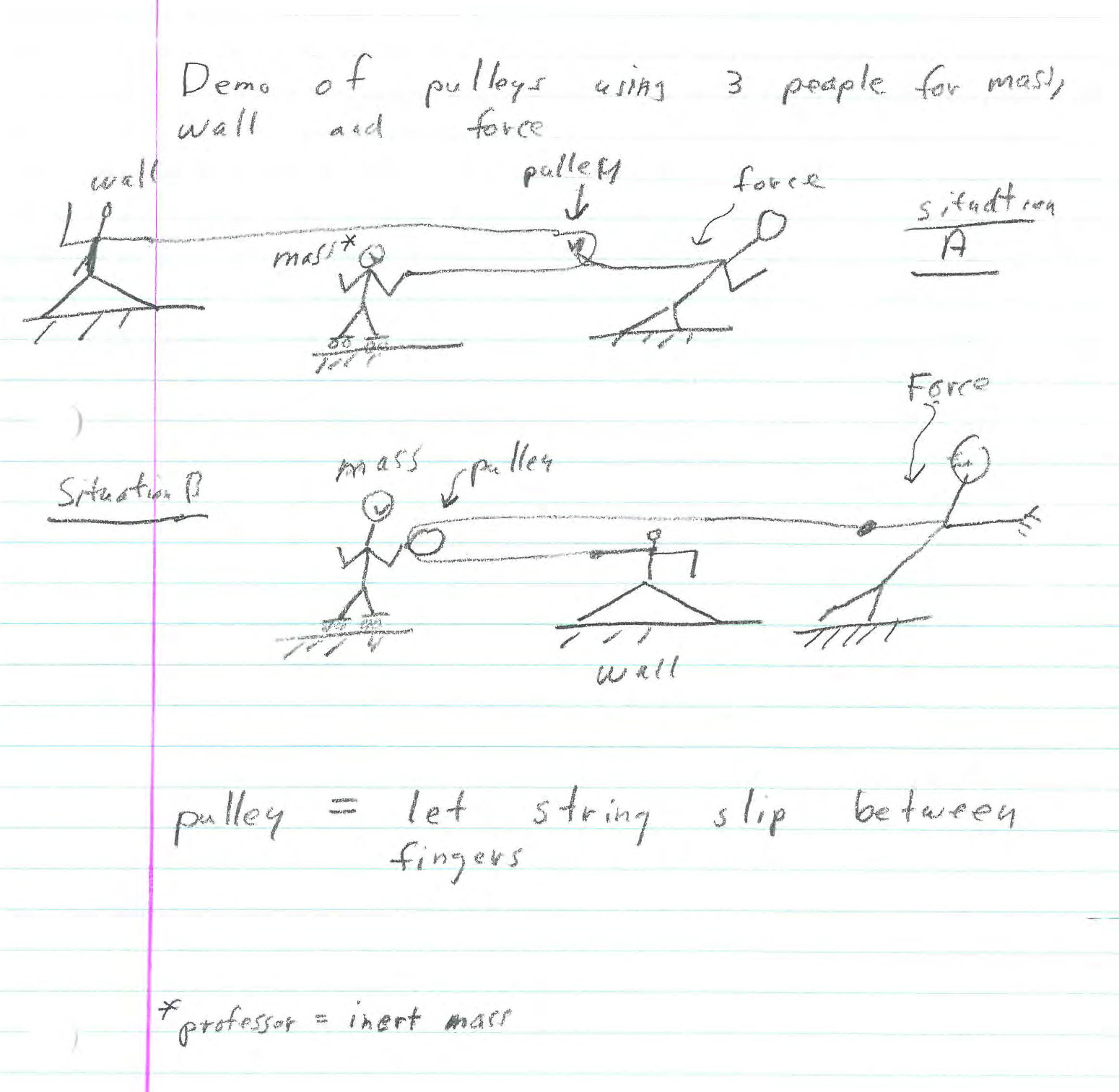
10) Human demo of pulleys. Use students or prof. as mass, force or wall. Pulley either goes with force or mass. In the photo the left student is a mass holding a pulley (string sliding through fingers), the middle student is a solid wall, and the right student applies a force. Therefor the left student has acceleration 2F/m and the right student has acceleration 4F/m.

11) Simpler version of above. Two students connected by a rope. Prof pulls on one of them. Showing the idea that if there are kinematic constraints one has to either a) finesse finding the constraints, e.g., by using system linear momentum balance, or b) Use kinematics equations as supplementary equations to help solve for constraint forces.
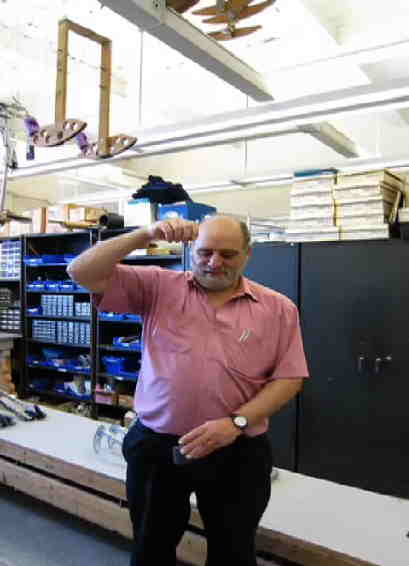
12) Simple pendulum. Hang a mass from a string (e.g., a pocket knife). Note various things: circular motion, effect of string tension, simultaneous validity of polar coordinate and cartesian representations.
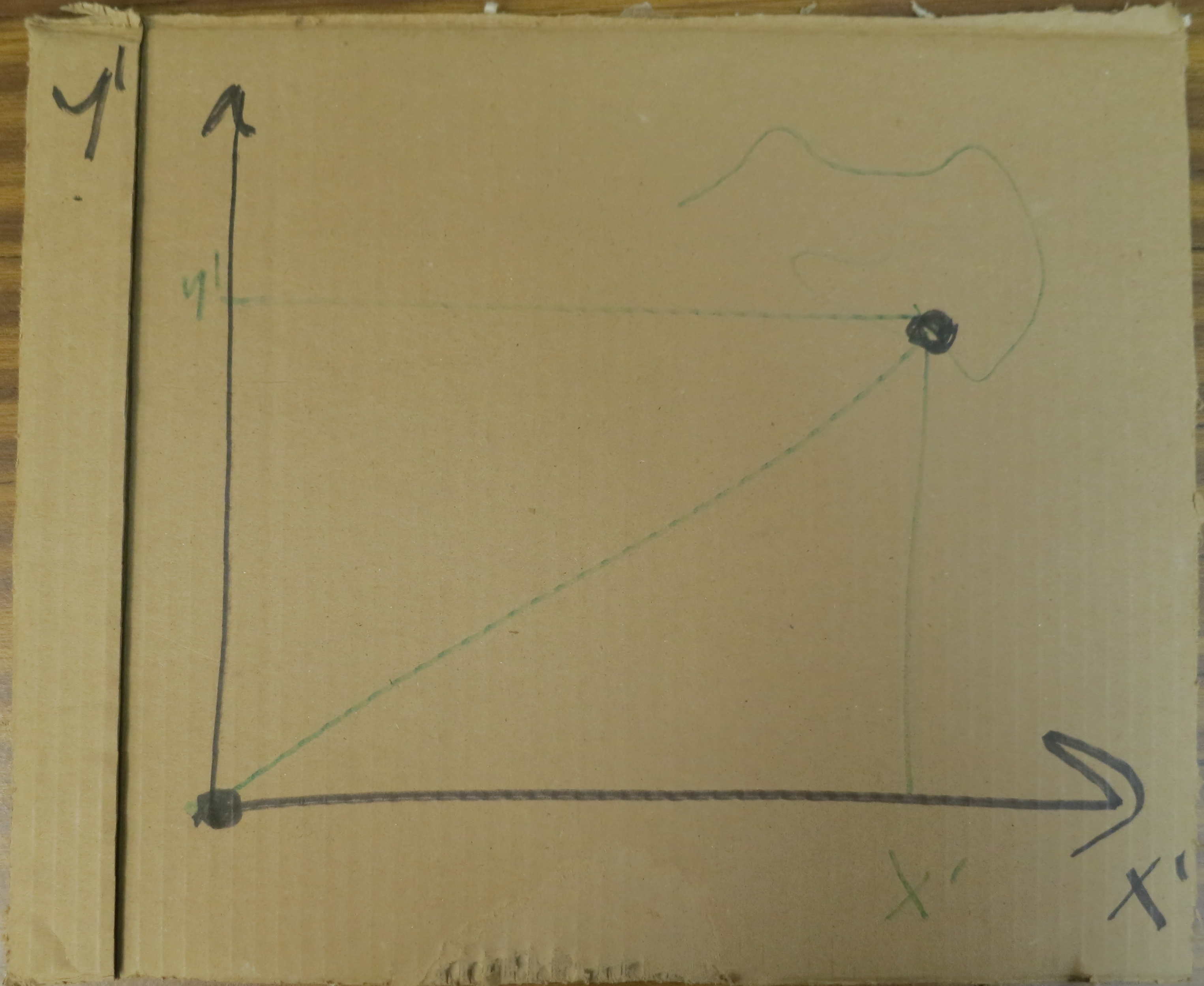
13) Rotated drawing. Draw on cardboard. Pin one point by pressing with finger. Rotate the drawing about the finger-hinge. Show how body fixed coordinates do not change in time but space-fixed coordinates do.
14) Physical pendulum (a yard stick suspended from a nail).
15) A clipboard suspended by a spring. Used as example for setting up 2D equations of motion of a rigid object in space
16) Movie spool. Showing various effects: pulling gently straight off bottom, pulling up, pulling at an angle, pulling hard
17) Kinematics of rolling using a disk rolling against the blackboard (using a 1960s hard-drive disk, but any disk will do). Draw the cycloid.
18) A disk rolling down hill. And down a steep hill so it slides instead of rolls.
19) A disk on a table cloth with the cloth pulled out from underneath (surprising answer: final rolling is at zero velocity).
20) A cube is balanced on one edge then falls onto another edge/corner and then tips up a bit.
21) Video of collisions in a walking robot.
22) "New gun". Nut slides on rotating rod and shoots dangerously accros the room. Good illustration of use of polar coordinates.
23) Slider crank: lawn-mower engine and hand-crank model.
24) Photo finish of bicycle race: explain the spoke patterns.
Compare top photos with lower photo (that Andy took):
Here is
a video of a TAM student Derek Faust's Matlab simulation of the effect.



25) Compare the period of oscillations of a swinging hoop with diameter D and a simple pendulum with length D. They match.
26) Spool sliding down a slope. The funny thing is that the bottom of the spool slides UP the slope.
27) Comparing and arrow with feather with an arrow with a ball at the end, using chopsticks.
28) Pull on the bottom of a bicycle pedal, backwards. Which way does the bicycle go? What if you pull hard?
29) Stick balancing using hand and stick. Using sideways acceleration, using wrist torque (with feedback) , using stiff wrist (open loop).
30) Balance by vertical oscillation of support. Scotch-yoke demo. Also video of same.
31) Video of human balance with 10:1 exaggrated horizontal motion. Also, people standing and thinking about their own ankle feedback loops.
32) Double Double-pendulum. Shown as a single pendulum, compared with another to show matching of solutions. As a double pendulum, showing chaos (Demo made by Jason Cortell to Steve Strogats' specs.